: M) O* ^' |' k2 s- C, i1 K! F# x. F
|
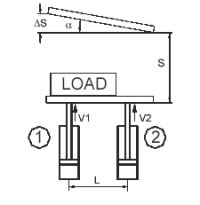
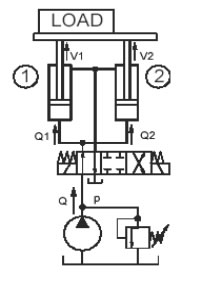
在多支路驱动器同时动作的应用设计中,等速同步驱动出现问题较为突出。为简化问题,用两个油缸的举升平台为例,下列公式和计算方法适应与多数驱动器,马达或油缸。
; r: P% A, p1 z1 Y" E2 p0 V* G如果载荷时对两个油缸不对称,油缸速度V1和V2不同,Q1和Q2流量不同,则油缸(1)和油缸(2)举升行程也不相同。看看下面的例子中油缸伸出速度不同对平台的水平位置的影响。
. g+ n+ u7 H& X. V D1 O( P0 ? |
|
|
|
 |
|
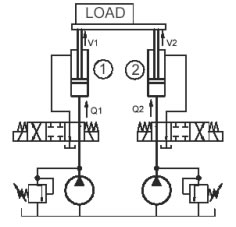
图1:两个油缸的举升平台
|
|
图2:平台的水平倾斜 |
|
|
|
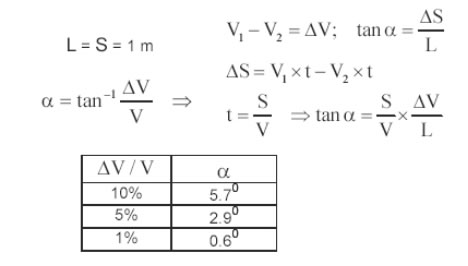 |
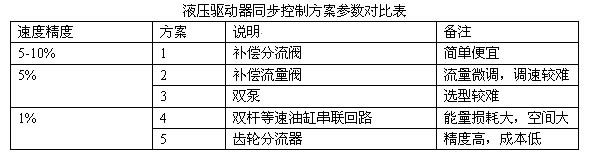
0 t; |- x! g. c/ T) O( J根据公式计算,速度变化时,平台倾斜角度随之变化,请见上表。可以根据工况来选择不同的设计方案。
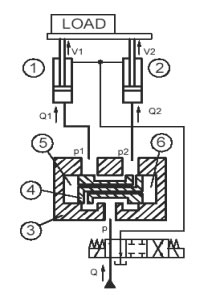
% [, S% B( t% ?% S6 a方案1:压力补偿分流阀( M- v( x7 h- E2 y
压力补偿分流阀将一路供油分为两路等量供油,不受输入输出压力的影响。
6 w" ^7 G$ i7 |& W当平台负载变化时,滑阀(4)在分流阀(3)中自动滑移,以补偿P1与P2压力的压差。压力通过滑阀内部的钻孔作用于相反一侧滑阀的端面,若P1压力较高,则相反一端的开口减少,其Q2开口流量相应减少,反之皆然。进口压力=高压出口的压力+开口的压降。集流阀的同步精度约为5-10%。
Z) z+ k- y$ {# c7 J9 V8 }
% L' p& @, C9 F7 z6 J+ @ |
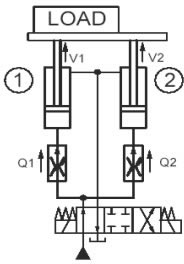
1 }9 y2 A, U' e3 |/ m3 @5 m, e方案2:压力补偿流量阀7 A* Y" S; t: P
压力补偿流量阀可以不受压力波动的影响,通过独立对个阀流量进行调整,满足同步速度的要求。该方案适用等量或不等量同步控制,对两路阀手动微动调整可以满足不同速度的要求。同步精度约为5%。. {6 l& x6 X( S' L
|
 & P# o& S% V5 ?' M$ H. {0 J & P# o& S% V5 ?' M$ H. {0 J
方案3:同型号液压泵1 n/ B- o, o' [5 Z
采用两个同样型号的液压泵也可实现同步控制。但是负载压力波动会影响液压泵的内泄。两泵方案实现调速较困难。控制的精度约为5%。
# p. m: n- k5 e; I. N. l; Y: Y |
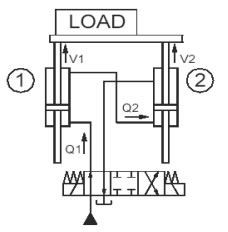
* L) V: C! U' c方案4:双杆等速油缸串联回路
: U8 l7 w4 O! z" V7 }采用双杆等速油缸串联回路的主要优点是容积效率较高。由于油缸1排出的流量与进入油缸2的流量相等,所以两油缸的速度相等。该方案等速同步控制精度约为1%。: m* C" ]" D& v: U. v
缺点是油缸1的压力为负载的2倍,另外双杆油缸的安装空间较大。
) n1 C/ T( U; S7 m |
 # B1 I2 v. V3 q! p! B # B1 I2 v. V3 q! p! B
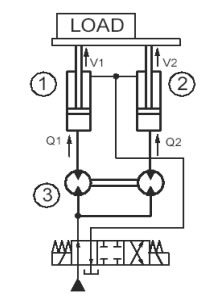
方案5:同步液压齿轮分流器
' R1 n, o- z: E" U- L3 g7 j旋转式分流器是将一路供油分为两路或多路等量或不等量供油,供油不受输入输出压力的影响。
; X3 u* s* U: f6 t. b7 j双片分流器是由两个相同排量的马达组成,采用公共轴连接,因此两个马达的速度相同,流量也相同。工作原理同于马达,由于驱动轴几乎不损失动力,所以各马达片间压降极小。在结构可以根据流量速度采用不同数量和不同型号的马达组合,选配灵活,适应范围较广。由于马达内泄较低,同步控制精度约为1%。
- }. O& D; Z( n C) ^8 r9 O& J该方案在同步控制中精度高,成本低,应用广泛。
0 L. B/ K2 _- e) _! z1 a( H |
 |


 发表于 2008-6-11 22:15:14
发表于 2008-6-11 22:15:14
 发表于 2008-6-12 09:55:15
发表于 2008-6-12 09:55:15

 楼主
楼主
