| 第4步怎么是X0 不应该是Y1吗 |
|
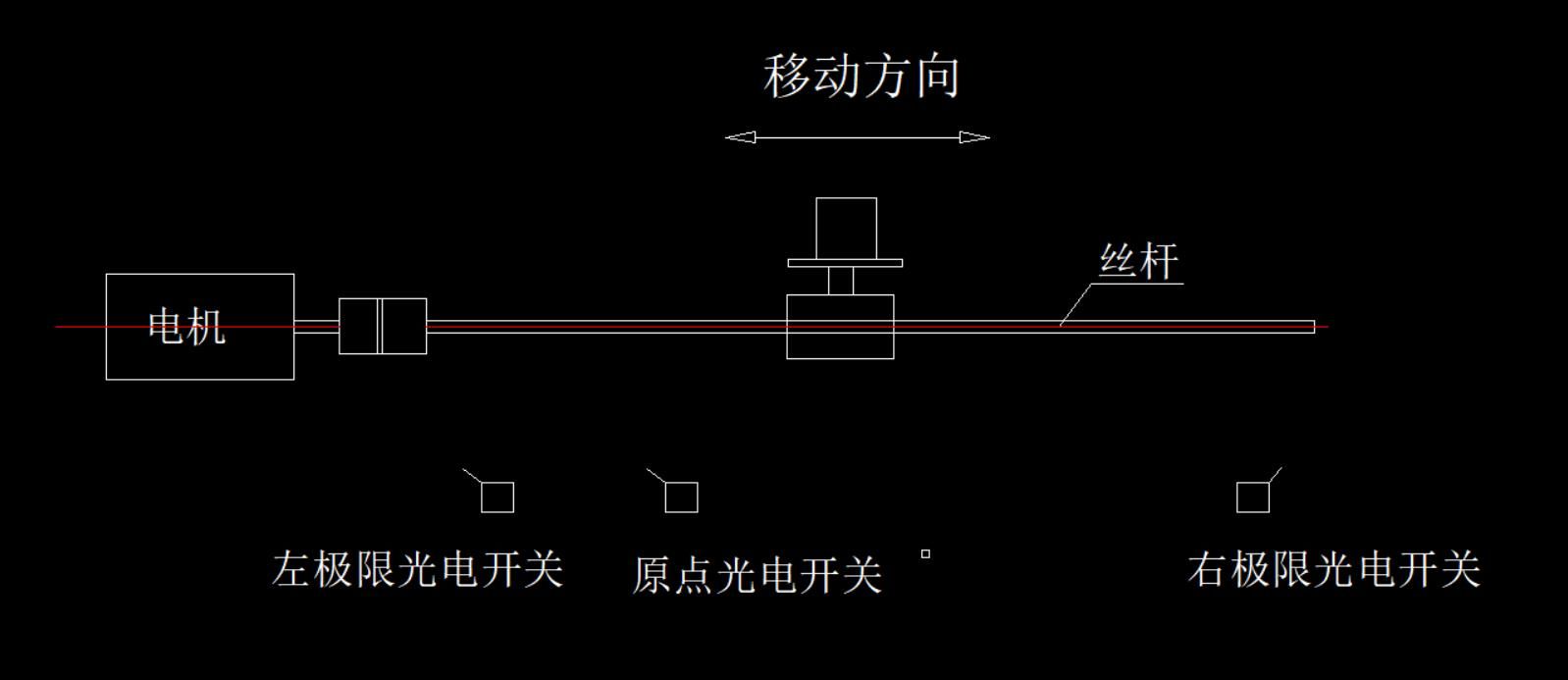
要是有原点,通过原点回归设置就可以让系统确定绝对位置。左右移动时走定长绝对位置就行,如果反复触碰两边的极限开关,时间长了开关会碰坏。一般运动控制系统里,左右的开关是做极限保护和找原点的返回信号用。/ [6 u9 e# C# n8 y$ d |
沁泽-冰兔 发表于 2019-2-14 22:12( o6 \$ s3 u& G/ Z& d: F: ^- |' K ALT是交替指令,一次触发MO 为ON ,再一次触发就OFF,再触发又ON,如此交替下去。属于方便指令。你可以用上升沿,在一个循环之后,全都置位一下。 |
仿佛是昨天 发表于 2019-2-14 09:50+ Z- \* S7 Z6 B: g 我是这么认为的 PLSR 发出脉冲后,电机旋转,碰到右限位开关后,我使用了ALT指令使伺服电机反转,这样的丝杆螺母就往回走了,不知道这样使用对不对? |
六个黄_V76Uk 发表于 2019-2-14 08:23, m5 ^. B0 c& m) q9 X 怎么置零啊?' |0 D+ A8 \/ H. ^ |
| 看样子用的应该是步进或伺服电机,那么你所想要的动作就不应该用这种方式来实现,而是应该通过改变脉冲数来实现;另外极限光电不是你这么用的,它不是用来做机械保护或原点搜寻时用的,正常工作中一旦动作都相当于有异常发生了;你最好对PLC的定位指令多看看说明书,一般都很详细,再结合你的实物试试就会理解了 |
| 完全不对的,PLSR那一行要有M的中间继电器,要不然得一直按着X0,X0不通就不走,往回走的语句没有。 |
|
我也是新手,只能说个大概,仅供参考。 1、电机不能立刻反转,需加个延时; 2、你说想在光电开关触发的时候电机停止,但是你没有这部分程序,而是在PLSR指令中设定脉冲数,这和你想要的是矛盾的。 3、你为啥用ALT指令没看明白。 |
| 有个问题,一个循环之后。要将M0和M1全都置为0才行。不然无法循环工作 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-24 01:05 , Processed in 0.056828 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂