|
。 |
| 666 |
siaoma3160 发表于 2018-11-13 15:55 调低系统增益,确实是会让动态特性变软,具体现象就是响应曲线的斜率变小,稳定时间变长。 但,是否在通电状态下,就可以轻易用手拨动,我没有做过测试,不敢轻易下定论 即使假定上面的说法是正确的,你提的疑问,我认为也是不相违背的 回答这个疑问,我觉得有必要说以一下PID,所谓的调低系统增益,就是调低P,也就是调低放大倍数,在产生同样偏差的情况下,用较小的输出去校正这个偏差,如果这个输出扭矩小到比手指产生的扭矩还要小,就可以用手拨动,但,我想也仅限于小范围的摆动,如果可以整圈的转,那只有一个可能,就是电机坏了。 转矩特性曲线是指的伺服系统的最大能力,如果是S1曲线,上面的某一个点表示相应转速下能长期输出的扭矩最大值,在产生偏差很大的时候,偏差再乘一个增益,就会更大,因此电机仍然可以按照自己的最大能力来输出 以上,是我的看法。 |
尘世天涯 发表于 2018-11-12 18:02 再继续请教下,我从一些帖子(//www.szfco.com/thread-477980-1-1.html)了解到:对于伺服电机驱动的设备,惯量比大导致系统产生振荡不稳定时,可以通过调低系统增益来改善,但这样会使系统的动态特性比较软,也就是锁机能力差,是不是可以理解为降低增益后,人为转动设备(设备为回转型)终端会变得相对容易。根据这个理解,是不是可以说伺服电机的保持转矩(上电后控制伺服电机转动一定角度后,停留在一定位置保持的能力)就与控制系统增益有关系了? 增益大,保持转矩大,增益小,保持转矩小?假如增益很小的话,是不是保持转矩就几乎没有了? 上面的结论又与伺服电机的转矩特性曲线相违背,因为根据伺服特性曲线理解的话,保持转矩应该就是伺服电机转速为零时的转矩,这个时候转矩是一个定值,跟控制系统增益应该没有关系? 上述疑惑应该怎么解释?麻烦大侠帮忙解答下 |
fangyunsheng 发表于 2018-11-13 07:41 从定性角度来说,伺服系统有两个指标,一个是动态性,一个是稳定性 动态性用来描述伺服系统对控制信号的跟随能力,量化的指标用带宽来衡量。惯量比越大,动态性越差。表现出来就是加减速能力比较低 稳定性是描述伺服系统抵抗外部扰动的能力,这个没有量化的指标。惯量比越大,稳定性越大,当惯量比超出限制,就会自激。 所以,加减速能力,只是果,惯量比才是因。 |
尘世天涯 发表于 2018-11-12 18:02 受教了!再次感谢! |
尘世天涯 发表于 2018-11-12 18:05 如果扭矩不够,根本不能带动负载正常运动呢? 惯量不匹配,倒是可以通过改变升降速时间来改善吧 |
fangyunsheng 发表于 2018-11-12 15:28 扭矩不够,如果应用场景降低要求,比如把加速度降下来,仍然可以用的,只是不能完全满足要求。因此是好不好用的问题 惯量比不对,电机上电就会出问题,参考楼上的解释。在不改变硬件(电机,减速机,传动链,负载)的情况下,这个问题无解。因此是能不能用的问题 |
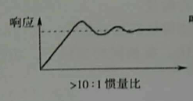
siaoma3160 发表于 2018-11-12 15:09 弹性碰撞理论,我认为跟我前面提到的理论并不矛盾。 理想情况下,负载的动量和电机转子的动量可以理解为完全弹性碰撞,动量在瞬间转移,而驱动器的作用就是把电机转子在瞬间获取的速度在尽可能短的时间抵消掉,并且重新转化为正值,再次与负载进行“碰撞”,可以理解为,负载前进的过程,就是无数次弹性碰撞的过程。到达位置之后减速的过程刚好相反。驱动器可以依靠调整施加给转子的单次的能量和频率来间接的调整负载的速度和位置。 实际的情况,系统不可能完全是刚性,任何传动系统都有间隙,即使是实心的零件,仍然会有弹性变形,这就相当于在转子和弹簧之间增加了一个弹簧,导致转子在调整的时候存在很大的滞后性,因此一定会有超调,只是调整的时间长短而已。 当转子惯量相当于负载惯量较小的时候,超调量就会额外增加,这个也很好理解,惯量比是1的时候,理想情况只要一次碰撞,负载就可以停住,惯量比是10的时候,同样条件要碰撞10次,负载才能停住。额外增加的调整时间就会影响系统的动态性能,因为需要的调整时间变长了,在要求的时间内走不到位。 当转子惯量远小于负载惯量的时候,就会发生啸叫,自激摆动。电机上电以后,首先就是自己定位,如果放在显微镜下面看,即使是不转的情况下,电机轴也是在做高频率摆动的。惯量比大到超过系统允许值的时候,就会发生“跑过”。电机不转时候可以理解为允许的调整时间为无限长,因此电机一定可以到达位置,但是到位以后停不下来,会冲过去,之后掉头,再次冲过,二次掉头,二次冲过,如此反复。本来只是微小的摆动,变得频率越来越高(啸叫),幅度越来越大(自激摆动) |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-12 09:45 , Processed in 0.056247 second(s), 17 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂