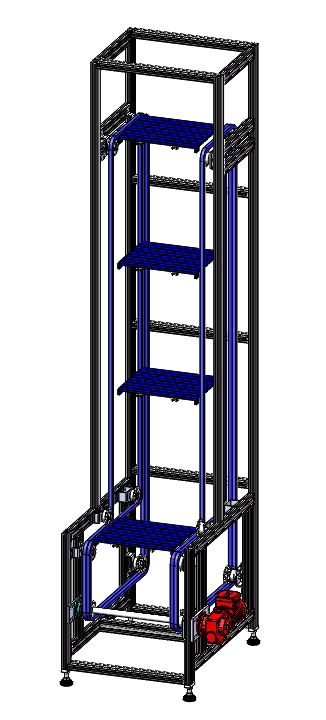
古德里安333 发表于 2018-1-24 11:59 如果托盘是往上的方向走,先把托盘调整到你需要的位置,在把硬限位调整好,硬限位是装在气缸上可以伸缩的,如果精度要求很高就加一个光电。当托盘往上行走到光电的位置,电机停止工作,气缸硬限位伸出,同时气缸硬限位的下方可以用聚氨酯把托盘往上顶,托盘离硬限位的距离可以调整为十丝,在聚氨酯的挤压下,可以把托盘和硬限位贴合,不知我这样描述你能否懂。 |
| 学习可= |
liufei0368 发表于 2018-1-24 20:56 就是绕啊绕的  |
| 加上霍尔接近开关,或者行程开关都可以,没太看明白你这个是如何实现连续Z向升降的 |
拾三少 发表于 2018-1-24 20:15 每链条精度无关了,只与提升段托盘前的的那个开关触板有关系。开关要做成固定的。 |
| 如果是在提升段按要求停止,是可以实现的。另外,不需要伺服电机,普通的变频电机就可以了,减速开关,到位停止开关。 |
|
采用链条,无很高的精度 |
| 你只是做运输线,完全可以满足 |
| 同困惑,求解 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-14 01:27 , Processed in 0.059785 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂