只需一步,快速开始
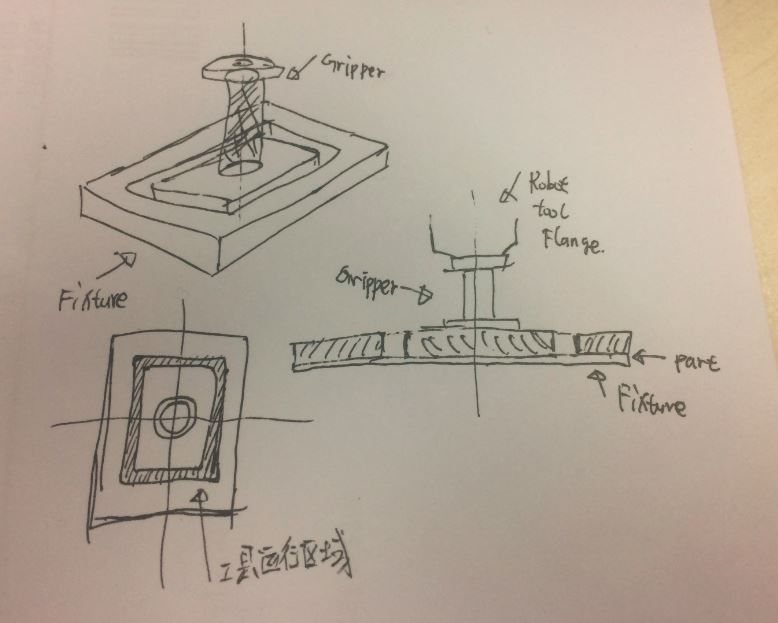
各位前辈高手. 遇到一个小麻烦, 如下图所示, 需要设计一个机器人抓手, 抓取一个方框形的夹具, 工件由操作工事先固定在夹具底面. 抓手抓取夹具后, 需要在其周边留出空间, 以允许刀 ...
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-26 21:19 , Processed in 0.053049 second(s), 20 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂