慕容揽月 发表于 2016-10-18 12:22 4个构件,画全了,1是主动件。 |
muyangtu001 发表于 2016-10-18 10:35 你这图的运动关系我没看明白,画全了吗? |
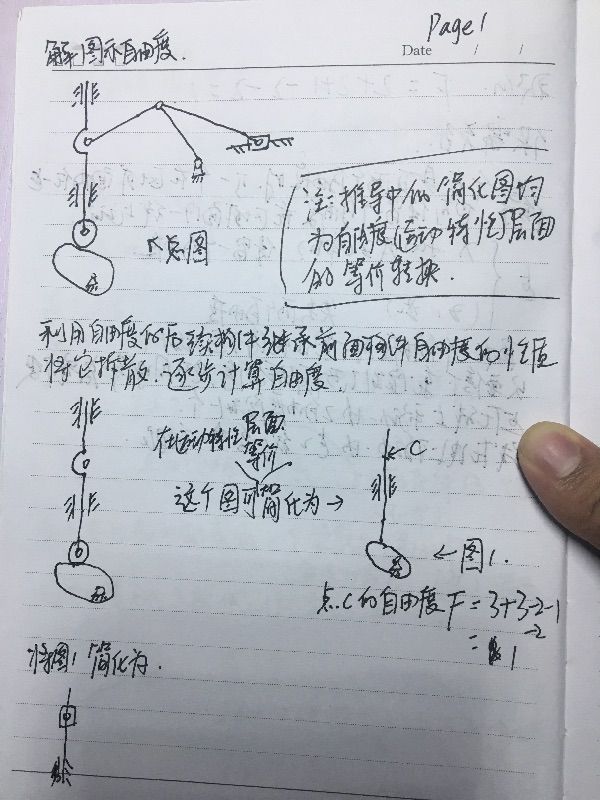
讲真啊,这个机构并不复杂,一个虚约束,一个复合铰链,一个局部自由度,而且每个运动副都很清晰明了。LZ这种后续构件继承前面构件的理论在课本里没怎么见过啊,点的自由度怎么理解?如果来个更复杂的,等价的过程是不是比直接计算还要麻烦啊。不过LZ这种深究的精神本屌佩服。
楼主感受下这个机构的自由度( h3 x* ~0 I3 Q. t7 h3 w+ U7 b6 r |
| 有用,非常巧妙。 谢谢。 |
左次无咎 发表于 2016-10-18 08:28) G* |/ K3 F9 s6 \ 拆,根据等价转换的规则,将复杂的拆为简单的小机构,对小机构进行检查自由度是否错 |
慕容揽月 发表于 2016-10-18 08:24 怎么反馈啊 |
永亮 发表于 2016-10-17 21:565 c- S$ ?3 _) M2 @6 k3 ?8 H 你这是直接套公式,对自由度没有向概念内深入,当你的构件及运动副数漏时,很难发现问题,没有反馈验证机制 |
| 学习了,谢谢! |
| 很久没有计算过了,只知道这么计算3x6-2x8-1=1 别的没用过,表示没看懂 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-26 00:47 , Processed in 0.054484 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂