|
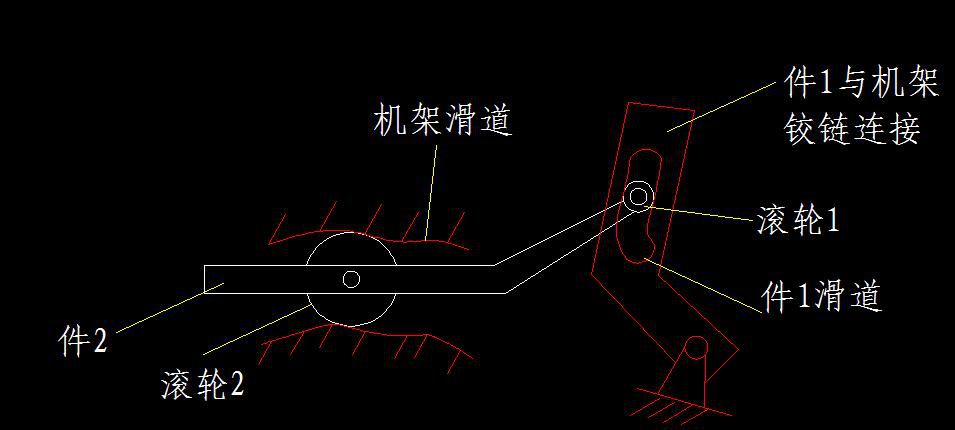
这东西不就是一个四杆机构,只固定一点,肯定有2自由度啊 |
| 继续研究 |
明月山河 发表于 2015-4-7 17:40 那么,当件1转过一个角度后如何确定滚轮1的位置呢?(只有确定了轮1的位置,我才能确定轮2的位置,继而确定件2的精确位置) |
zerowing 发表于 2015-4-7 20:59 那么,当件1转过一个角度后如何确定滚轮1的位置呢?(只有确定了轮1的位置,我才能确定轮2的位置,继而确定件2的精确位置) |
|
一觉醒来,实在是有些糊涂。哈哈。 这个题很有意思。清醒点了,重新画了画。 两个轮确实应该都是局部自由度,因此都简化成一体。于是运动件数为2,低副一个,高副两个,最后自由度为2。哈哈。 实际使用中存在的所谓确定运动,只是摩擦力作用和限位端共同作用的结果。换句话说,高副不高。 |
zerowing 发表于 2015-4-7 18:35 轮2的水平移动和杆的水平移动时耦合的,所以只有一个自由度。 |
|
本帖最后由 zerowing 于 2015-4-7 19:22 编辑 验算了一下,应该是3个。 运动件3,低副2,高副2,(右侧轮为局部,因此同杆2视为1件)。 所以是3*3-2*2-2=3。 包括,轮二的水平移动,杆二的水平移动和绕轮二的转动。(修正下,应该是轮二的转动,杆二的平移和绕轮二的转动 |
| 此机构有2个自由度。 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-19 00:52 , Processed in 0.061136 second(s), 24 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂