小羊tec 发表于 2013-8-23 14:30 非常感谢大侠的详细回答,我大概明白了: 1.因为普通电机的机械特性是变数,不像伺服那样是定数,所以还是从扭矩(T=惯量J*W角加速度)来看待这个过程,因为惯量是定值,所以扭矩越大,角加速度也越大,转动效率更高。 2.减速比与速度效率的问题。速度的传递,最终还是会被过高的减速比降低。而普通电机因为转速和扭矩都是变数,所以只能靠调,而不是像伺服那样设定好了数,然后交给驱动器的PID运算完事 |
沙滩的足迹 发表于 2013-8-23 14:34 速度提高,转矩下降?为什么?这是步进马达的特性呀! |
我在飞 发表于 2013-8-23 13:37 谢谢大侠,我也按最高转速算过,得出的结论是36度/秒, 这个还不算加减速时间,我困惑的是加速过程中,速度提高,转矩下降,也就是角加速度是个变数,对不对? |
|
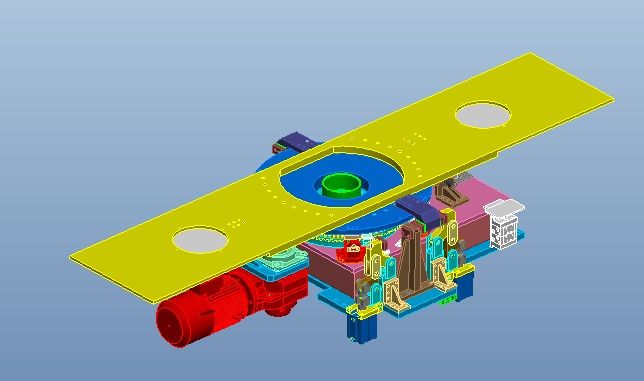
本帖最后由 小羊tec 于 2013-8-23 14:37 编辑 楼主的问题我无法全部回答,因为算这些东西我真不内行,但我可以跟你分享控制方法和相关经验,首先肯定一下设计的非常好,这种场合这样的方案是非常理想的! 1. 按照理论算没有加减速的情况,1:500 马达3000r/min ,刚好5s/半圈,但是无法做到没有加减速,所以降低减速比,增加马达功率;(大小齿轮那里就不要改了,把减速马达换换) 2. 控制系统用变频,在你的两工位基板下方离轴心远点的对称位置装一个感应用的螺丝(或其他),与其发生感应的则有两个接近开关,其中一个为减速检测(可调),另一个定位;(精度应该够了,按常规这种结构精度不可能高到1mm以下) 3. 你担心的加减速转矩的问题,我给个不专业的说法,仅供参考:在如此大的减速比情况下,而且是水平负载,你的马达功率应该在3KW以内,再复杂的计算最后都有一个“安全系数”,在成本允许的情况下,当然越高越好,这种小功率的马达,你买大两号的成本也增加不了多少,在足够转矩的情况下,配上变频器的“加减速时间”,还有“减速检测传感器的位置”,相信能调出一个你想要的效果! 4. 哦还有刹车和伺服停止的区别,首先刹车一般刹高速轴,所以一般装在电机屁股后面,属机械性抱死,伺服停止则不一样,它没有机械抱死这么厉害,仅靠自身马达特性在通电时0速度全扭矩的方式控制停止,你要强制将它偏移了,就报警了,很多伺服也加了刹车的, 但是,我认为楼主这个系统加不加刹车应该都无所谓,精度影响不大。 |
| 看你的图不知减速机的速比是多少,不好确定 |
| 定位精度是多少,启动时间多长?楼主自己是怎么考虑怎么计算的? |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-17 03:54 , Processed in 0.058947 second(s), 25 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂