| 学习学习 |
| 学习学习 |
桌前一盆花 发表于 2023-7-2 12:28 好的 |
| 像这样的大机器人,底座的板应该是在在1600×1600左右了,平摊每平米400公斤了,查一下书,差不多也就三百多到四百公斤 |
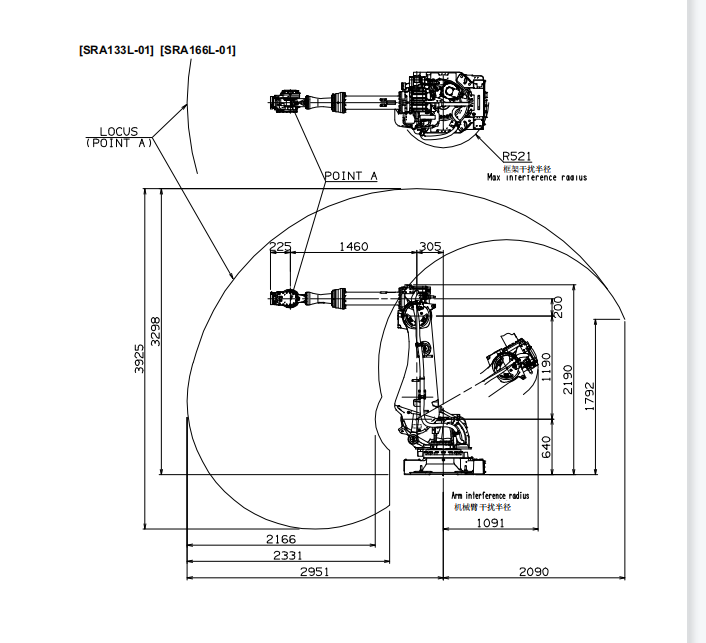
| 机器人空间活动半径,负载,等等参数找供应商要。 |
leyfa7@126.com 发表于 2023-7-2 11:58 1.你就把干涉的地方给供应商。把你的运行范围要求告诉他就行了。他那里有软件可以仿真的。 2.运动受限目前我这里估计只有两个原因,一个就是机械臂被外界干涉了。另外一个就是运行中出现了奇异点。其他的没有什么问题。 3.多做点这方面的运动仿真就可以了。其他的问题都不大。 |
桌前一盆花 发表于 2023-7-2 08:44 其实一开始我也感觉挺简单的,但是有一次不知道什么原因,现场人员说机器人运动受限报警,我们企业比较小,见的东西比较少,也缺乏一些相应资料,目前感觉这是个瓶颈 |
|
哈哈。这个确实是一个问题。 确定底座的方式大概有三四个条件。需要同时满足。 1.你这边要求的运动范围。 2.可以在CAD或者是Solidworks里模拟一下你的运动范围需求,注意需要避开奇异点。 3.周围的环境,比如灯泡,隔墙等。注意机械臂运动时的避开干扰。 4.上面的运动轨迹模拟了,就可以确定底座的大小和范围,还有距离工作范围的距离了。 这里可以给你推荐一个机械臂专用的模拟软件。芬兰的VC,全名比较长,你知道是VC是芬兰产的软件就行了。学起来还有点麻烦。需要你自己学习一段时间的。如果公司里不需要长时间的模拟仿真就没有这个必要。可以找厂家给你模拟一下。你把所有的干涩条件画出图来,让厂家的人给你模拟之后就可以提供底座了。另外厂家也有底座图纸的。只是高度和离工作范围的距离需要你自己去仿真模拟。 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-9-24 22:24 , Processed in 0.054691 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂