斯文棒棒 发表于 2023-6-15 15:04 我们目前就是这样的,出现了很多干涉问题,以改动图为例左下角的点,有转轴干涉,右上角的点要始终高于或等于左上角的点 |
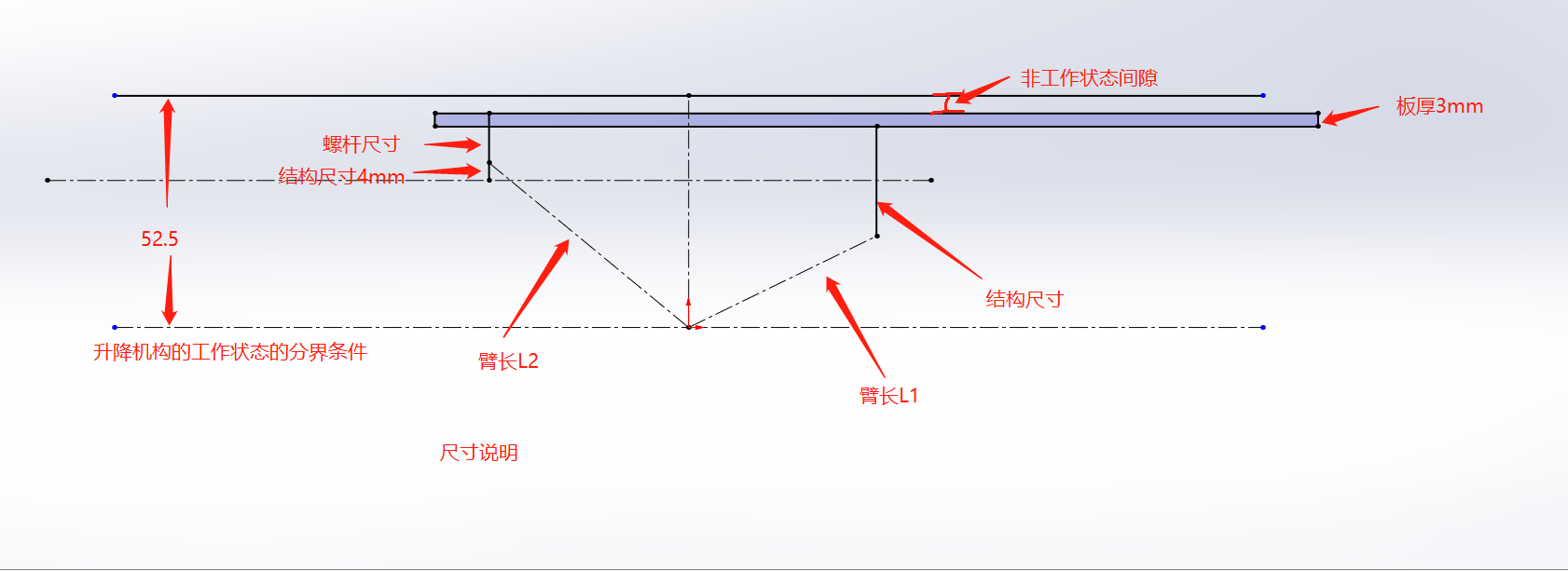
斯文棒棒 发表于 2023-6-15 13:52 类似一个跷跷板,跷跷板水平的时候不工作,左边翘起时处于工作状态1,右边翘起时处于工作2,现在跷跷板不满足工作条件要优化,该怎么做 |
| 没看明白是怎么回事?你就说机构要怎么运动,有什么运动要求。 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-25 11:47 , Processed in 0.050569 second(s), 20 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂

