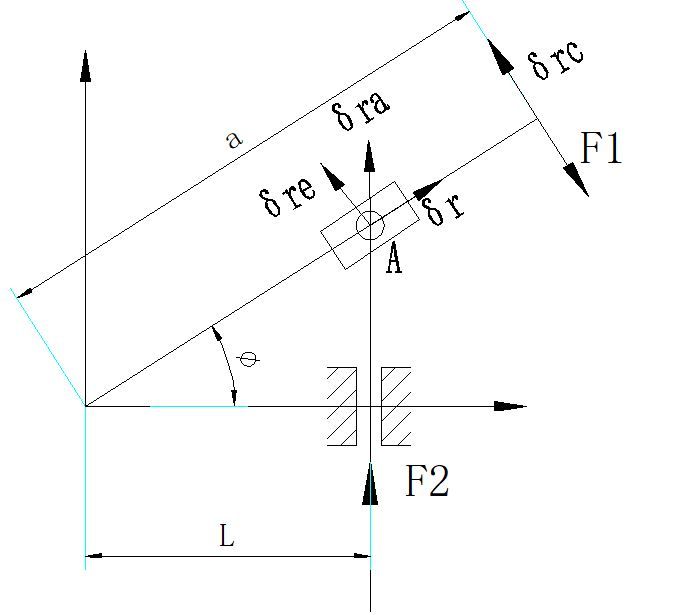
| 把等式2换个形式就好明白了 那只是两点之间,位移到旋转中心的距离的比值相等。δrc/OA=δre/a |
|
本帖最后由 开心789 于 2023-3-5 15:49 编辑 先理解几个基本定义: 1.真实力在虚位移上做的功称为虚功。 2.虚位移指的是弹性体(或结构系)的附加的满足约束条件及连续条件的无限小可能位移。 3.一个原为静止的质点系,如果约束是理想双面定常约束,则系统继续保持静止的条件是所有作用于该系统的主动力对作用点的虚位移所作的功的和为零。 有了这几个共识。再看上面的公式就好理解了。 图里面少了几个字母标识,原点为O,F1的受力点为C。 F2*SRA=F1*SRC,因机构平衡,受力平衡,虚功原理和为零。其实式里的S是DETA,代表微小位移。 SRA/SRE=COS(φ),虚功三角形的几何关系。 最后得F1/F2=L/a |
liuxiaoran 发表于 2023-3-4 20:55 位移和力臂长度线性? |
|
2中 S_RC/S_RE=a/OA,是几何关系啊。--------位移和力臂长度线性啊。有什么问题? 然后OA=L/COS(角度)也是几何关系啊。---------这就是余现炫的定义啊。 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-25 22:43 , Processed in 0.051271 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂