象山哥哥 发表于 2022-5-18 08:25 那种类型的,有标注的浮动模块吗? |
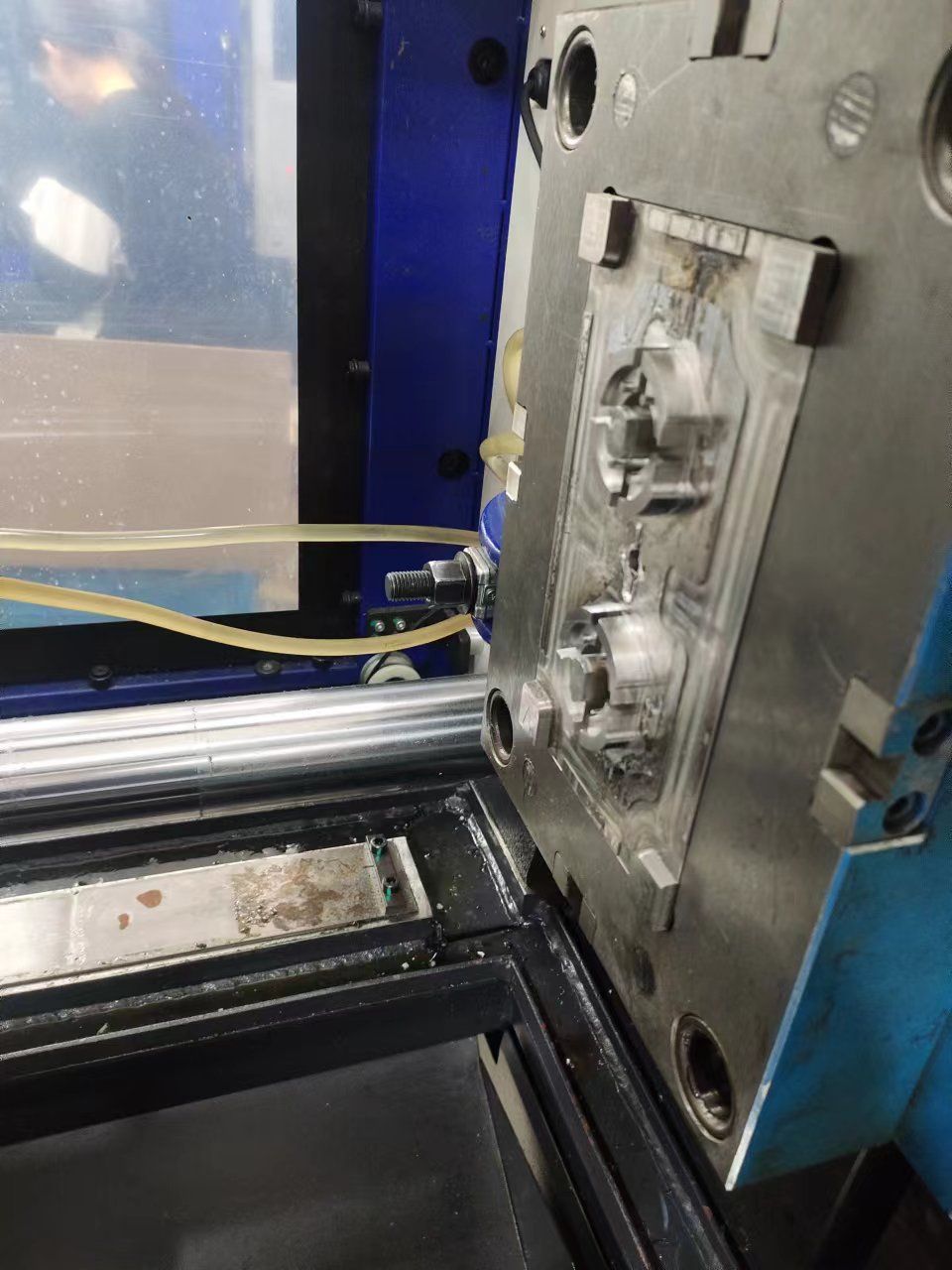
wlj0202 发表于 2022-5-18 09:58 主要还是镶件那边的嵌入导柱 不能有任何倒角导致的 |
|
本帖最后由 wlj0202 于 2022-5-18 09:59 编辑 嵌入底板的导向倒角够不够大,够不够长? |
| 可以试下夹具前端安装柔性模块 |
| 这种要做有点浮动的。硬碰硬精度达不到很难放进去的 |
|
楼主好: 单论滑动副,单边5-10丝间隙已经很松了。 解决这个坑,要加导向。嵌件和模具配合滑动副的导向,加导向降低安装精度要求。 另外就算定模进胶口位置通过试机一丝不差,模具角度怎么保证呢?那不是每次都要调机械臂参数。 |
LiNing_jrjub 发表于 2022-5-17 16:31 考虑到那个旋转气缸和推进气缸的问题了,后面的有个照片其实我把这些都给拆了的 |
我在或不在呢 发表于 2022-5-17 15:56 其实我后面改成单孔的了,我插进去了,但是嵌件插不进去,用手的话嵌件也能插进去 |
LiNing_jrjub 发表于 2022-5-17 16:31 应该将完整的机械臂照片发出来。 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-12-26 15:17 , Processed in 0.050784 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂