| 楼楼主,最后咋解决的呀,求助 |
| 脚杯要用带有缓冲垫的,脚杯直径不能低于100mm,方刚架底部焊20mm厚的钢板,不够方钢管里可以灌铁砂,机器人底部可以加一块缓冲的橡胶垫 |
|
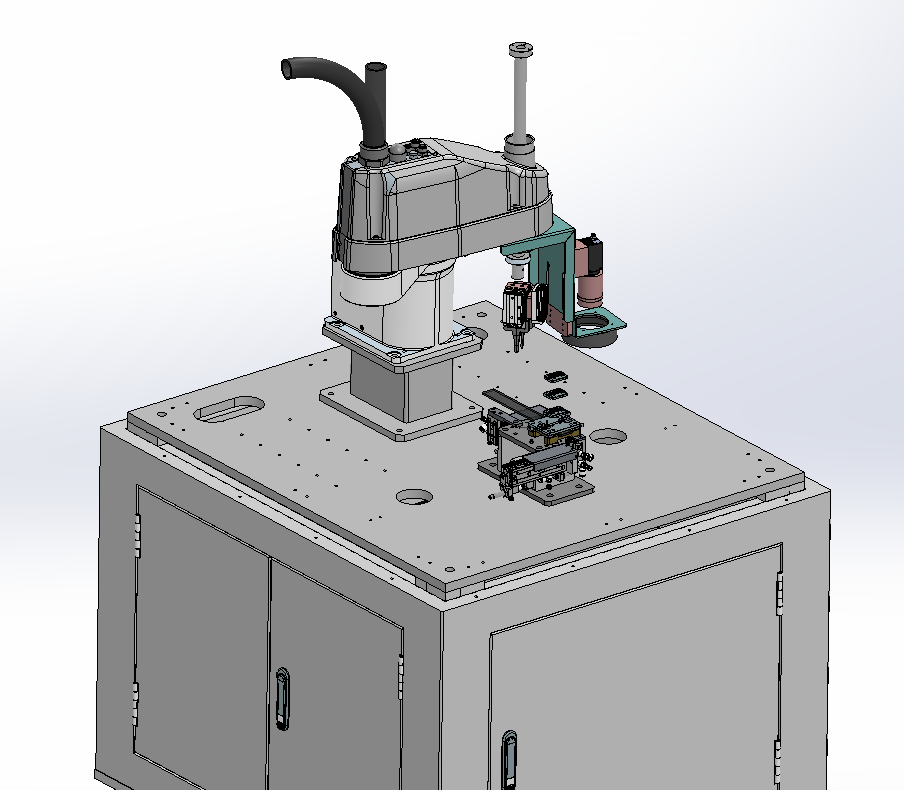
如图上的小设备,不知道各位大神有没有好的建议,防止震动?有听别个说有个简单估算,机柜重量是机器人重量的一定倍数可以防止震动,但是找不到资料啊 |
远祥 发表于 2020-6-25 07:42 代工厂不让地面打螺丝,都是3C设备,基本上直接放地面上;下面地脚加了防震脚垫,有时候效果不大,特别是附近有一些震动比较大的设备会有影响; 我们的设备普遍偏小,1200x1000以内的视觉检测设备,有时候机器人上面挂相机或者机器人去产品去固定位置检测,所以对震动比较敏感; |
| 楼主不会直采用配重,而不用打膨胀螺丝与地面固定吧?? |
| 这个问题不好回复,因为机器人的重心如果在架子投影之外,也会出现倾覆力矩吧? |
|
本帖最后由 譬如朝露 于 2020-6-24 18:21 编辑 搞多重都没用,最多只能保证你底座不打摆子,不保证上面那机器人不打摆子 |
| 這樣問問題,沒人能回答 |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-30 14:43 , Processed in 0.054718 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂