|
第一:建立一个初步数学模型。固定端是哪里 凡是被驱动零部件各个重心都求出来,再加上最大负载的重量合计求出总的重心。 第二:已知最大重心位置和旋转轴中心线位置关系根据惯量计算公式计算最大角加速时产生的最大扭矩。 最后加上安全系数求出你要的参数。记住如果速度再快的话可能产生离心力,需要动力计算伺服电机保持扭力大于惯性扭力才能保证电机能控制得住否则电机会容易报警。 |
| Solidworks可以辅助计算。 |
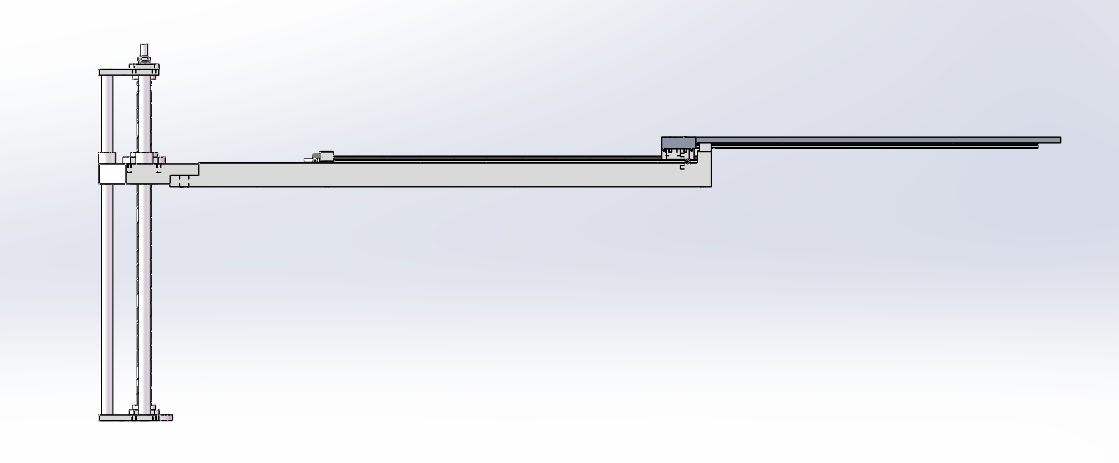
| 你这惯量要按机械臂完全伸出时算,那才是最大惯量 |
|
1.你先百度“常见刚体转动惯量”理解一下转动惯量吧,文库里面有https://wenku.baidu.com/view/27864fed6aec0975f46527d3240c844768eaa06c.html?fr=search 2.伸缩臂有两节,按照最长的长度计算 |
还珠楼主 发表于 2020-5-19 13:44 我放在楼下了 |
| 能不能贴个简单示意图出来啊? |
小黑屋|手机版|Archiver|机械必威体育网址 ( 京ICP备10217105号-1,京ICP证050210号,浙公网安备33038202004372号 )
GMT+8, 2024-11-23 17:24 , Processed in 0.051382 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 问题专业,描述清楚
问题专业,描述清楚 伸手党/灌水/看不懂
伸手党/灌水/看不懂