机械必威体育网址
标题:
收料机构的设计
[打印本页]
作者:
start_00000000
时间:
2023-10-8 17:07
标题:
收料机构的设计
如题,这个是我面试的一个题目,老板的意思是让我来设计并给一定的报酬,至于多少,大家可以估计下
9 D$ _* F1 s7 y4 Q. d- j. o0 [- e: Y
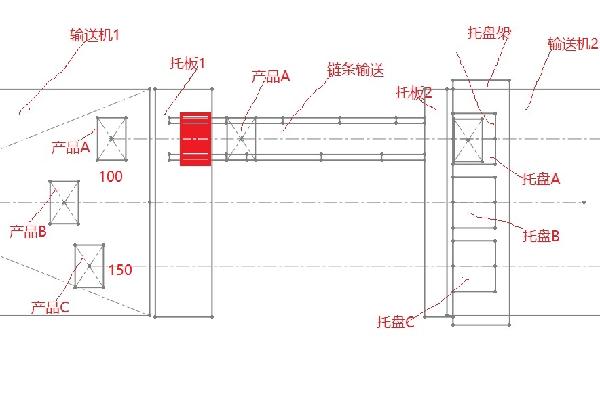
如图,输送机1上有3列产品,大小重量材料都差不多,可以看成一种物料,大小为150?100?3,重量几十克吧,类似于包装好的一包袋装眼罩,速度节拍每分钟120件。三排就是360.
# u- f2 k; e z; S
要求实现
0 J3 Z \; v! j& L4 c2 p7 c& _
1.计数收料 比如25件收料
& s" {+ k1 y6 x4 A/ g5 Y) T
2.收料装入托盘中,并自动送入下一个输送线上
$ y6 Q; i4 S& x5 k$ {0 q( P
3.托盘可以人工,但要求前一个托盘装满产品后自动进入下一个输送线。同时下一个托盘自动进入。
& D) G$ Q' P6 ~; ?- y4 u% L
我大概画了个草图,大家看下
' Q7 D. U5 X* p, S# H' a6 N
1.输送机1是来料输送机,后面有一个拖板。 高度低于输送机1。 这一步实现收集25个眼罩的功能。
3 \9 J, d& o+ K ^ B+ R" A
2.链条输送。 链条上有挡边定位。收集25个产品后,链条输送一定距离
' |/ C. u7 N5 _
3.链条输送推动25个堆叠好的产品进入拖板2上面,后续再来25个推动的话,前面25个产品就会被推入后面的托盘里
! W+ r" c/ o8 B# p8 a
4.托盘两侧被气缸卡住,25个产品到位后,气缸松开托盘,托盘下降被输送机2带走。同时上面的托盘进入位置等待接料。
6 x/ M: w6 y9 z: m. ` P
请大家看看此方案如何,或者有更好的方案可以讨论下
作者:
小机123
时间:
2023-10-8 17:18
面试考他们没有做过的方案?还有偿???
作者:
东北制造
时间:
2023-10-8 21:04
7 P" `# d- a# J* {+ _4 Y
o(*≧▽≦)ツ:;:感覺就是坑‼️
9 I- O: c3 Y; K: h6 s
- m6 ^% J" t j& }. G
! `5 ]) j, S0 [1 j$ h5 G; S" c$ b6 e
作者:
ytzhanggj007
时间:
2023-10-9 06:21
想免费找人帮着讨论方案,茶水钱都不用付,打着面试的幌子,白嫖一大堆方案供他们参考,然后确定方案自己做。这就是现在某些小老板的套路。养不起人,还想找人免费出方案,然后自己凭着自己不专业的绘图功底自己画图或手画草图加工出来。这就是他们全套的流程
作者:
ytzhanggj007
时间:
2023-10-9 06:23
这些给你的要求一看就是没什么逻辑和实际使用效果的要求,最后耗费了你的精力也不会有结果,这就是结局。
作者:
ytzhanggj007
时间:
2023-10-9 06:27
做非标,一定找熟悉人介绍的靠谱客户。网上找人的大多没什么经济实力,也看不起设计的作用,感觉随便画画就行,大都不想花钱,这种你还希望能挣他们的钱?你掰断他手指也落不下几个钱
作者:
朱守武
时间:
2023-10-9 08:57
这种东西,抖音上不是很多么
- ?( M/ B# C2 A9 R& m/ ]& ?+ ?! U
作者:
SNT
时间:
2023-10-9 09:08
楼主想要交流A,坛友们却在那扯B...
作者:
SNT
时间:
2023-10-9 09:12
从要求120件/min 速度还是挺快的。要是连续生产对或许每个环节要求都比较高。建议可以在输送线1上做可切换的双通道收集,这样既满足前道工序高效的收集,也给后道工序攒出12.5s的操作节拍。
作者:
同创达-叶工
时间:
2023-10-9 09:17
简单啊,给他一个带视觉的机械手就完事了
作者:
喂我袋盐
时间:
2023-10-9 13:34
同创达-叶工 发表于 2023-10-9 09:17
0 i9 q4 D& v: l* W6 f2 Q6 m
简单啊,给他一个带视觉的机械手就完事了
0 I& t; j( D) D, ?) x! X8 E
先聊预算。再聊报酬。
% e+ ~: W- | f" K
作者:
a19783307
时间:
2023-10-9 15:34
链条传送本如本身是采用一个一个接的话,节拍时间比较高能。根据提供数据可以明显看出,单类产品节拍2个/S。在收集阶段采用单个收集的话,会给后面装盘动作提出很大挑战,危险性较高,就算采用蜘蛛多脚机器人难度也是较大。个人建议收集阶段应采用输送段快速拉开距离,并用光电上下对射检测数量,后段收集采用固定工装层叠形式收集,利用输送带拉开的距离时间,设计接料装置实现料品的由上至下的收集25个(25*2=50秒),接连装置要两个进行循环替换,满仓交由后方的简易机械手进行装盘(50S的装盘时间搓搓有余)。这样设计应能做到成品最小化,如果采用高速的多脚机器人,成本会较高些,但适用性较强,高速真空破坏加平移摆拍缺失较为简单。但对于一般企业投入产出比也提出了很大的挑战。
欢迎光临 机械必威体育网址 (//www.szfco.com/)
Powered by Discuz! X3.4
 ! `5 ]) j, S0 [1 j$ h5 G; S" c$ b6 e
! `5 ]) j, S0 [1 j$ h5 G; S" c$ b6 e